Allegion Developer Portal
Allegion Developer Portal

| REVISION CONTROL RECORD | |||
|---|---|---|---|
| VER | DATE | DESCRIPTION OF CHANGE | AUTHOR |
| 0.3 | 1/26/2016 | Engineering reviewed version | Z. GrandPre |
| 0.4 | 1/29/2016 | Including changes from the second round of review | Z. GrandPre |
| 1.0 | 1/29/2016 | Including changes from the last round of review | Z. GrandPre |
Table of Contents
Introduction 3
Wireless door sensing 4
2.1 How it works 4
2.2 Importance of calibration & installation 4
2.3 What affects readings 5
2.4 Magnetic tamper alert 5
2.4.1 Calibration required to clear magnetic tamper status 5
3.1 Testing door status without door frame 7
3.2 Testing magnetic tamper alerts 7
3.2.1 How to force a magnetic tamper 7
3.2.2 How to clear the magnetic tamper status 8
| Abbreviations Used In This Document | |
|---|---|
| DPS | Door Position Sensor/Switch |
| EAC | Electronic Access Control |
| ENGAGE™ | Connectivity Platform Technology |
| MEMS | MicroElectroMechanical Systems |
| REN | Request to Enter (outside trim lever) |
| REX | Request to Exit (inside trim lever) |
This document describes the technology behind the wireless door position sensing, how to test it and implications of this technology.
Electronic locks traditionally have required many holes to be drilled in and through the door in order to install a reed switch to allow for the lock to if the door is open or closed. In order to achieve door position sensing without the burden of traditional electronic lock door preparation, the NDE lock uses a combination of an internal magnetometer (magnetic field sensor) and permanent magnets installed behind or near the door frame’s strike plate. The same technology is expected to be used in other future products.
The wireless DPS will regularly wake up and conduct a magnetic field sensor reading. Each reading captures magnetic field values in 3 dimensions and combines these into a single value. This value is compared against a known baseline to conclude if the door is open or door closed. The algorithm employs hysteresis to guard against subtle changes in the magnetic field.
In order for door position sensing to be accomplished, the included magnets must be installed in the door frame. They are usually included in the door strike plate, but for some models a dedicated drill hole is needed for the DPS magnet. See specific product installation guide for details. The purpose of the magnets is to provide a sufficiently strong & unique magnetic field for the DPS to determine closed or open (or even ajar). See the Section: Importance of Calibration and Installation for more information.
The magnetometer is extremely sensitive. It is able to detect the slightest change in door position, but this also means that it detects slight changes in background magnetic fields. See the Section: What Affects Readings for more information.
Door position sensing occurs every three seconds, in order to achieve product battery life requirements, which has a very important impact on the responsiveness of the overall system. This means that door status change will take 1.5 seconds on average (and up to 3 seconds worst case) to be detected after the door has opened. While this time is not long enough for a user to get through the door and shut it without being noticed, it does have longer latency than a reed-switch and thus there will be some differences noticed between the DPS detection in AD and other – no prep – solutions. See the Section: Implications of Wireless DPS Technology for more information.
In order to perform reliably, the lock and door frame magnets must be installed correctly. The user guides provide very detailed instructions and should be followed very carefully by lock installers.
Calibration with the ENGAGE mobile app is equally important. During the commissioning of the ENGAGE device, there is a step where the mobile app user is prompted to shut the door and press “calibrate.” It is critical that the lock installer makes sure the door is completely closed during calibration. After the lock is told to calibrate it will do a series of sensor readings that are used to determine the “door closed” baseline. If the door is open or even slightly ajar during calibration the door position sensing will be unreliable and most likely trigger false “forced door” alerts.
The wireless DPS is affected by external factors that might not be obvious to users. The door position sensor uses a magnetometer to determine door status, so anything affecting the magnetic field near the door will be sensed by the DPS. This could be other magnets in close proximity, but can also be ferrous materials. A steel door frame is accommodated for during calibration, but if a piece of metal is held near the DPS an open status could be reported; this includes a change in position of the inside lever of the lock. See the Section: Implications of Wireless DPS Technology for more information.
Ambient temperature also affects sensor performance. The product has been designed to accommodate temperature fluctuations during operation and work correctly inside the product’s specified temperature range, but door position sensing will be negatively affected if the product is used significantly outside of the specified temperature ranges. See product’s specification sheet for the temperature range.
The wireless door position sensing introduces a new tamper event that every host system must support.
If there is a sudden and extreme increase in the magnetic field near the wireless door sensor (such as a person holding a strong magnet near the door position sensor), this will cause the current reading to be significantly changed beyond the baseline. If the strong magnet is continued to be held near the DPS, the device will conclude that there is a magnetic tamper event. While the magnetic tamper status is active the lock will continue to behave normally, but any functions related to door position sensing will be affected, such as door open, forced door, and door propped alerts. For NDE locks linked to a Gateway that are running firmware version 2.6 or newer, the magnetic tamper alert will also force the door status to report as open.
A magnetic tamper event is an indication by the lock to the head-end system that the lock has been blinded to door position sensing and cannot reliably determine door open from door closed. The MEMS technology used in the magnetometer is susceptible to strong magnetic fields, so the removal of the source is not enough to return the magnetometer to the baseline condition. This means that when the system has gone into magnetic tamper, usually it requires a recalibration to correct the tamper. A sudden and brief change in magnetic field (less than a few seconds), may not require recalibration and the magnetic tamper status will be cleared automatically.
In the event that a magnetic tamper event is reported, a site administrator will most likely need to visit the lock in question and recalibrate the door position using the ENGAGE mobile app.
Allegion highly recommends that the host system notifies its administrator to visit the lock and recalibrate.
Prior to recalibrating, the administrator should check for evidence of tampering, such as a user placing a magnet on or near the lock for decoration. Having an administrator present at the lock to recalibrate ensures that the door close position is properly set. Remote recalibration is not supported. See the Section: How to Clear a Magnetic Tamper Status for instructions on how to recalibrate.
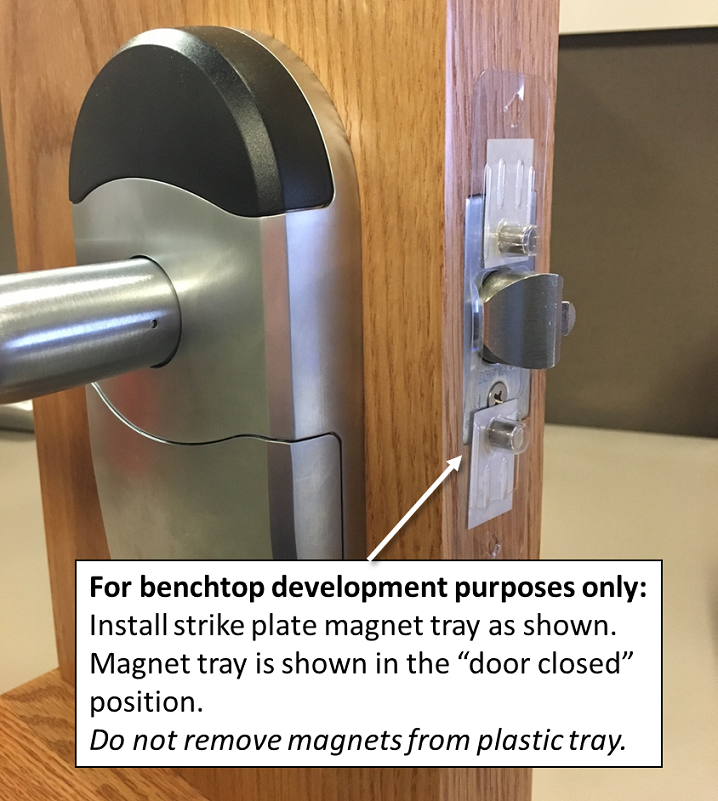
For bench-top development or demonstration of a lock using the wireless door position sensing and a lock mount, the strike plate magnets should be properly affixed to the mount. Without the magnets affixed to the mount in a way that is similar to a door frame, the lock will not be able to sense door position.
Figure 1 shows a recommended setup for NDE when using a demo lock mount.
In the example, even a slight rotation of the strike plate magnet tray will trigger a door open status to be reported, so users must take special care to return the magnet tray to the same orientation and location on the latch plate.
Figure 1: Bench-top Demo Example
The following two sections contain more information on how to test the magnetic tamper reporting and clearing.
These steps assume you have a fully commissioned lock, and when connected to a gateway, that lock is linked, with the lock having proper door calibration.
Place a strong, permanent magnet on the center of the inside escutcheon, directly above the battery compartment, but below the inside lever. See Figure 2 as an example for NDE.
Wait a moment for the magnet to be detected by the lock. This may take up to three seconds.
For WiFi connected locks:
For locks linked to a gateway:
RSI mode: via the Gateway, confirm via APM_STATUS message that the Magnetic Tamper Bit is now set.
IP Mode: via the Gateway, confirm the status tag “magTamperDetected” is reporting as true.
Remove the extra magnet from the lock’s inside escutcheon.
Figure 2: Magnet Placement Example

Connect to the lock with the ENGAGE mobile app.
If the lock with an active magnetic tamper status is linked to a Gateway, you must force a temporary BLE disconnect:
In the ENGAGE mobile application, select “Calibrate Door Position”.
Confirm the door is in the closed position with strike magnets installed properly; see installation instructions (or installed similarly to as they would be in the field if on the bench-top, see the Section Testing Door Status Without a Door Frame).
In the ENGAGE™ mobile application select “Calibrate.”
Disconnect the ENGAGE mobile application from the lock.
Wireless door position sensing is a new technology to electronic access control (EAC) and was not designed to replace the standard reed-switch based DPS altogether. As such there are some implications to the EAC ecosystem that we want to bring special attention to:
Latency of door sensing impacts online systems’ determination of “forced door.” A host access control system should not conclude forced door event if a door position status is reported within 1.5 seconds on average, 3 seconds maximum, of relock action. See the Section: How it Works for more information.
If a user rotates and holds the inside trim lever (REX/Request to Exit), the DPS will see a change in the environment and conclude that the door has been opened. This is due to the long-term affect of having the steel spring cage exposed to the magnetic field generated by the magnets placed behind the strike- plate. The wireless DPS should not be expected by head-end system to be able to differentiate between a person holding the inside lever and NOT opening door versus a person holding the inside lever and opening door. See the Section: What Affects Readings for more information.
Schlage electronic locks always allow egress, so when the inside lever is held the latch is retracted allowing for the door to be opened. Therefore when the inside lever is turned enough to trigger the “door open,” the door should be considered unsecured.
If the lock is configured to report its own door propped events to the host and the user holds the inside lever beyond the door propped threshold, this will result in a door propped event being recorded. When using the RSI protocol architecture, door propped events are determined by the EAC panel/controller.
Request to Enter(REN)/Outside lever does not cause door open status to be reported as the spring cage is too far away from the sensor to cause an issue.
Proper installation & calibration is critical. See the Section: Importance of Calibration and Installation for more information.